


1寧11擔乮嬥乯偐傜JTB僣傾乕俁攽係擔偱僌傾儉偵峴偭偰偒傑偟偨丅栚揑偼僑儖僼偲娤岝丄娭嬻偐傜偺弌敪偱偡丅堏摦偼幵偱丄10擔乮栘乯屵屻7帪偵晉嶳傪弌敪丅搑拞丄崅懍摴楬嬤偔偺僒僂僫偱壖柊丅娭嬻廤崌偼弌敪乮10帪45暘乯2帪娫慜偱丄JTB偺憗婜怽崬摿揟偱JTB儔僂儞僕偱弌敪傑偱備偭偨傝弌棃傑偟偨丅嬤擭僌傾儉丄僒僀僷儞偼擔杮恖娤岝媞偑彮側偔丄僒僀僷儞偼嶐擭丄捈峴曋偑側偔側傝傑偟偨偼丅擔杮偺峲嬻曋偼側偔丄奿埨峲嬻偑庡棳偱偡丅僌傾儉傑偱偼娯崙偺Tway峲嬻乮Lcc乯俁帪娫30暘偺僼儔僀僩偱偡丅擖崙庤懕偒偵2帪娫嬤偔偐偐傝旀傟傑偟偨丅
丂儂僥儖偼Reef仌OliveSpa丅柍椏儔僂儞僕偑棙梡弌棃偒丄挬偺寉怘傗擔拞偼僪儕儞僋堸傒曻戣丄栭偼價乕儖傗儚僀儞偑堸傔傑偡丅晹壆偵偼僂僅僞乕僨傿僗儁儞僒乕偑偁傝丄偍搾傕弌傑偡丅
丂栭偼僗僥乕僉乮T.G.I.僼儔僀僨乕僘乯傪怘傋傑偟偨丅恖婥揦偱揦傪弌傞偲偒偼懸偭偰偄傞恖偑偨偔偝傫偄傑偟偨偑丄巹偑怘傋偨偺偼丄岥偵崌傢偢巆擮偱偟偨丅
亂12擔乮搚乯亃
丂壀杮埢巕娔廋偺僌傾儉僀儞僞乕僫僔儑僫儖偱偺僑儖僼偱偡丅挬丄7帪偵寎偊偺幵偑棃傑偟偨丅僐乕僗偼峳傟偰偄偰丄僋儔僽僴僂僗傕屆偔丄奿埨儕僝乕僩僑儖僼応偲偄偭偨姶偠偱偟偨丅偟偐偟丄拫偵怘傋偨椻傗偟偆偳傫偼旤枴偟偐偭偨偱偡丅
丂儂僥儖偵婣偭偰價乕僠傪嶶嶔丄偦偺屻楒恖枽傑偱娤岝偵峴偒傑偟偨丅僣傾乕偵偼愒偄僶僗偑忔傝曻戣偲側偭偰偄傑偟偨偑丄楒恖枽曽柺峴偒偼桳椏偱偟偨丅儂僥儖偐傜僞僋僔乕偱峴偒傑偟偨丅椏嬥偼墲暅亹50乮僠僢僾崬傒乯丄尒妛拞偼懸偭偰偄偰偔傟傑偟偨丅
丂栭偼僒儞僪僉儍僢僗儖偱僨傿僫乕僔儑僂偱偡丅儅僕僢僋僔儑僂偱丄儂儚僀僩僞僀僈乕傕弌偰偒傑偡丅夛応偼椻朳偑偒偮偔丄姦偔偐偭偨偱偡丅
亂13擔乮擔乯亃
丂儅儞僊儔僆偱偺僑儖僼丅挬丄6帪10暘偵寎偊偺幵偑棃傑偟偨丅奀墇偊偺僔儑乕僩儂乕儖偑桳柤側僑儖僼応偱偡丅椏嬥偼崅偄偱偡偑丄僇乕僩偵堸傒暔偑偮偄偰偄偨傝丄椻偨偄偍偟傏傝偑偱偨傝偲僒乕價僗傕椙偔丄僋儔僽僴僂僗丄僐乕僗傕偒傟偄丅拫偵怘傋偨椻傗偟拞壺傕旤枴偟偐偭偨丅僐乕僗偺拞傑偱僇乕僩偑擖傟側偄偺偑巆擮偱偟偨丅僪儔僀僶乕偼嵟崅318儎乕僪傕旘傃傑偟偨丅擔杮偱偼峫偊傜傟傑偣傫両
儂僥儖偵栠偭偰偐傜偼丄奨拞嶶嶔丄僀儞僗僞僗億僢僩弰傝丅攦偄暔偼拞怱奨偱攦偆傛傝丄峹奜偺K儅乕僩偑偍偡偡傔偱偡丅
亂14擔乮寧乯亃
丂挬7帪偵儔僂儞僕偱挬怘傪偲傝丄傾僩儔儞僥傿僗僒僽儅儕儞偱悈怺40倣偺奀拞嶶曕偱偡丅嶺岃徥偺拞偵偊偝応偑偁傝丄偦偙偵廤傑偭偰偔傞擬懷嫑傪尒偰傑傢傝傑偡丅愽悈娡偼梙傟傕側偔丄夣揔偱偟偨丅
丂儂僥儖偺寎偊偼屵屻1帪偱偡丅尰抧偺Big側僴儞僶乕僈乕傪怘傋傞梊掕偱偟偨偑丄帪娫偑側偔丄儂僥儖慜偺儅僋僪僫儖僪偱僴儞僶乕僈乕傪攦偭偰儂僥儖偺儔僂儞僕偱怘傋傑偟偨丅嬻峘偱偼弌崙庤懕偒屻弌敪傑偱偼2帪娫傎偳偱偡偑丄懸崌幒偵偼堉巕偑彮側偔戝曄偱偟偨丅
丂娭嬻偵偼梊掕帪崗傛傝彮偟抶傟7帪30暘摓拝偱偡丅擖崙庤懕偒丄壸暔傕僗儉乕僘偵庴偗庢傟丄摓拝儘乕價乕偵弌傞偲幵偑慜偵帩偭偰偒偰偁傝傑偟偨丅
丂娭嬻偱偼丄幵傪僞乕儈僫儖偱梐偗丄婣傝偼摓拝儘乕價乕慜偵幵傪夞憲偟偰偔傟傞僒乕價僗偑偁傝丄偙傟傪棙梡偟傑偟偨丅
怺栭丄1帪偵婣戭丄妝偟偐偭偨僌傾儉椃峴偼廔傢傝傑偟偨丅
丂婣偭偰偐傜傢偐偭偨偺偱偡偑丄僌傾儉偼堸怘丄攦偄暔側偳偼T億僀儞僩偑偮偒傑偡偑丄偙傟傪慡偔棙梡偟偨偐偭偨偺偑巆擮偱偡丅2006擭偵僌傾儉偵峴偭偨帪偼忲偟弸偔丄椙偄僀儊乕僕偑側偐偭偨偺偱偡偑丄崱夞偼擔嵎偟偼嫮偄偑丄幖搙偼掅偔姶偠傜傟丄傑偨峴偒偨偔側傝傑偟偨
慜夞(abc762)偺夞楬傪巊偭偰丄壜曄掞峈婍傪夞偡偲LED偺柧傞偝偑曄壔偡傞乮PWM棙梡乯丅
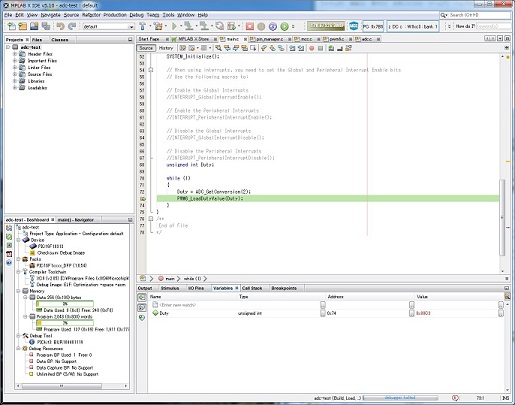
void main(void){
SYSTEM_Initialize();
unsigned int Duty;
while (1) {
Duty = ADC_GetConversion(2);
PWM6_LoadDutyValue(Duty);
}
}
|
 |
 |
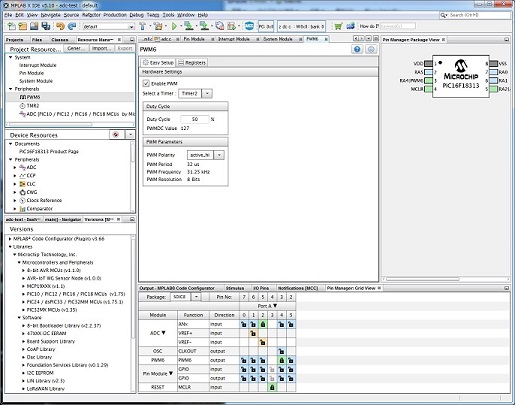 |
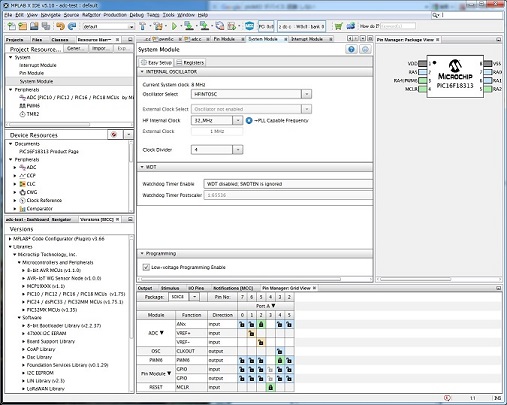
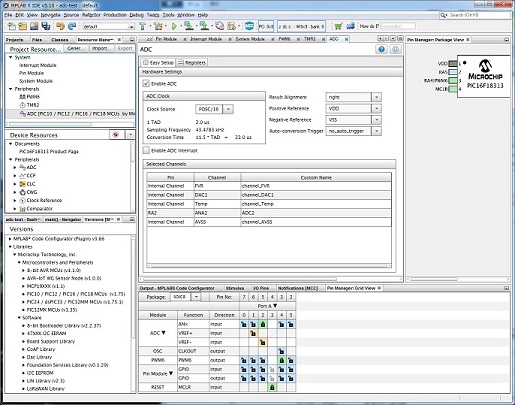
| MCC偱config愝掕 | MCC偱ADC愝掕 | MCC偱PWM愝掕 |
 |
 |
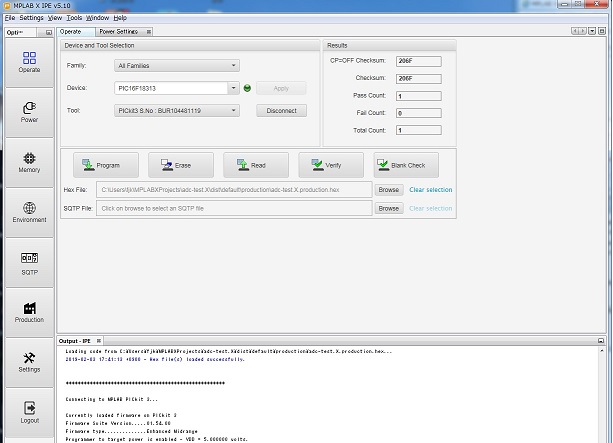 |
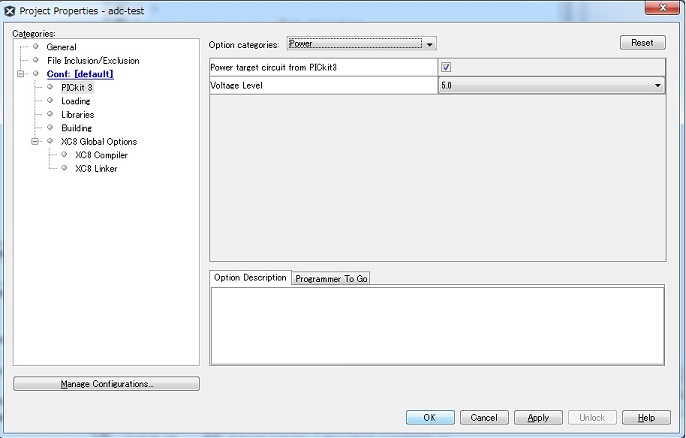
| PicKit3愝掕 | 僨僶僢僌儌乕僪 | IPE傾僪僶儞僗儌乕僪 |
| 亙piservo2.html亜 | 丂 | 亙piservo2.py亜 |
<html>
<head>
<meta http-equiv="Content-Type"content="text/html;charset=UTF-8">
<title>WebIOPi Test2</title>
<!-- WebIOPi偺Javascript偺巊梡愰尵 -->
<script type="text/javascript" src="/webiopi.js"></script>
<!-- 儃僞儞偺惗惉丄婡擻偺愝掕偲柤徧愝掕 -->
<script type="text/javascript">
IOPI = webiopi();
IOPI.ready(function(){
var StopBtn = IOPI.createButton("Stop", "Stop",
function(){IOPI.callMacro("stop"); } );
var CcwBtn = IOPI.createButton("CCW", "CCW",
function(){IOPI.callMacro("ccw"); } );
var CWBtn = IOPI.createButton("CW", "CW",
function(){IOPI.callMacro("cw"); } );
var ForBtn = IOPI.createButton("Fored", "For",
function(){IOPI.callMacro("fored"); } );
var BackBtn = IOPI.createButton("Back", "Back",
function(){IOPI.callMacro("back"); } );
$("#stopbtn").append(StopBtn);
$("#ccwbtn").append(CcwBtn);
$("#cwbtn").append(CWBtn);
$("#forbtn").append(ForBtn);
$("#backbtn").append(BackBtn);
});
</script>
<!-- 僗僞僀儖僔乕僩掕媊丂儃僞儞偺宍忬巜掕 -->
<style type="text/css">
button{
font-size:2em;
width:110px;
height:70px;
margin-left:20px;
float:left;
}
</style>
</head>
<!-- 儁乕僕偺惗惉 -->
<body> <br>
<p style="text-align:left; margin-left:100px;">
<font size=6>[Tank-Conrole Test]</font><br></p>
<p style="align:center">
<table border=0 cellspacing="10">
<tr><td> </td>
<td><div id="forbtn"></div></td><td> </td></tr>
<tr>
<td><div id="ccwbtn"></div></td>
<td><div id="stopbtn"></div></td>
<td><div id="cwbtn"></div></td>
</tr>
<tr><td> </td>
<td><div id="backbtn"></div></td><td> </td></tr>
</table>
</p>
</body>
</html>
|
丂 |
import webiopi
import pigpio
webiopi.setDebug()
GPIO = webiopi.GPIO
pi = pigpio.pi()
Rmt = 17 # 塃僒乕儃愙懕僺儞
Lmt = 18 # 嵍僒乕儃愙懕僺儞
R_hm = 1455 # 塃掆巭僷儖僗暆仸
L_hm = 1450 # 嵍掆巭僷儖僗暆仸
Speed = 75 # 昗弨懍搙(掅懍乯
RpSpd = Speed * 2 # 崅懍
#弶婜壔娭悢丂GPIO傪弌椡儌乕僪偵愝掕
def setup():
GPIO.setFunction(Rmt, GPIO.PWM)
GPIO.setFunction(Lmt, GPIO.PWM)
pi.set_servo_pulsewidth(Rmt, R_hm)
pi.set_servo_pulsewidth(Lmt, L_hm)
#儅僋儘娭悢
@webiopi.macro
def stop():
pi.set_servo_pulsewidth(Rmt, R_hm)
pi.set_servo_pulsewidth(Lmt, L_hm)
@webiopi.macro
def cw():
pi.set_servo_pulsewidth(Rmt, R_hm + Speed)
pi.set_servo_pulsewidth(Lmt, L_hm + Speed)
@webiopi.macro
def ccw():
pi.set_servo_pulsewidth(Rmt, R_hm - Speed)
pi.set_servo_pulsewidth(Lmt, L_hm - Speed)
@webiopi.macro
def back():
pi.set_servo_pulsewidth(Rmt, R_hm + Speed)
pi.set_servo_pulsewidth(Lmt, L_hm - Speed)
@webiopi.macro
def fored():
pi.set_servo_pulsewidth(Rmt, R_hm - Speed)
pi.set_servo_pulsewidth(Lmt, L_hm + Speed)
#廔椆娭悢丂GPIO偺PWM儌乕僪傪夝彍
def destory():
GPIO.setup(Rmt, GPIO.IN)
GPIO.setup(Lmt, GPIO.IN)
|
 |
 |
 |
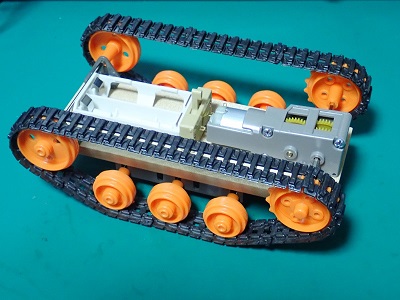
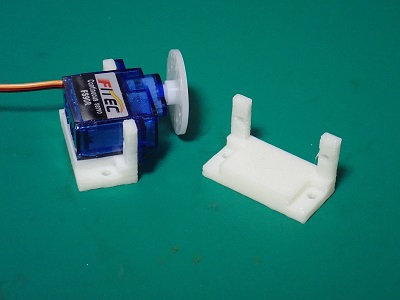
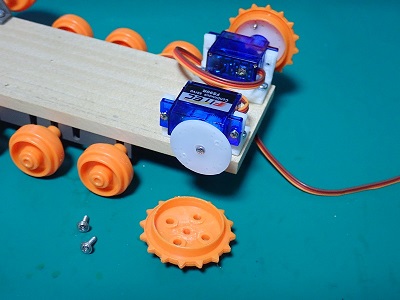
| 僉僢僩傪偦偺傑傑慻傒棫偰 | 儌乕僞儅僂儞僩(stl) | 摦椫偺夵憿(儃僗傪庢傞乯 |
 |
 |
 |
| 儂乕儞偺庢晅(僱僕偱乯 | 儌乕僞偺庢晅(栘儀乕僗偵乯 | 僉儍僞僺儔偺庢晅 |
 |
 |
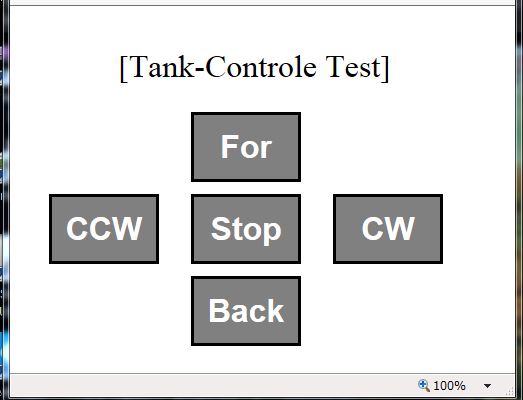 |
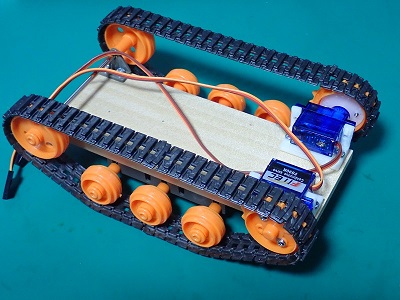
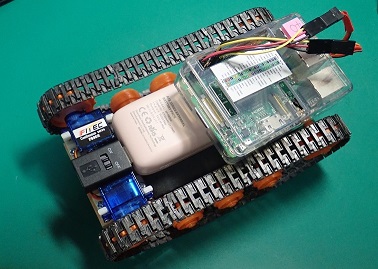
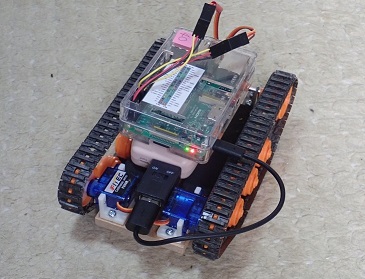
| 揹尮偼USB揹抮(+SW) | 憱峴僥僗僩拞 | web惂屼夋柺 |
 |
 |
 |