


ワープロで一部の文字を回転させたり、複数の文字を一文字等にしたい時は、拡張書式が使える。
|
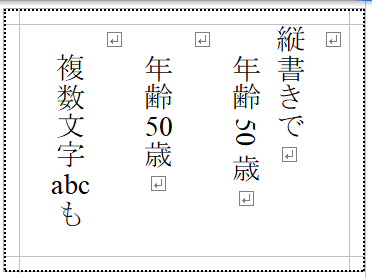
1.縦中横 (縦書き、横書きのどちらでも使用可) 半角や数値、英字の文字列を90度回転する。
|
|
|
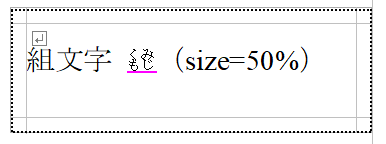
2.組文字 文字列を上下2段に区切って1文字として表示する。
|
|
|
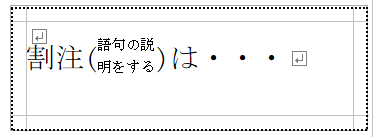
3.割 注 内容や説明などの語句の注釈を上下2段の文字列として括弧でくくる。
|
|
|
4.重ね文字 2文字を重ねて一つの文字に(図形で文字列を囲む場合は別)。
|
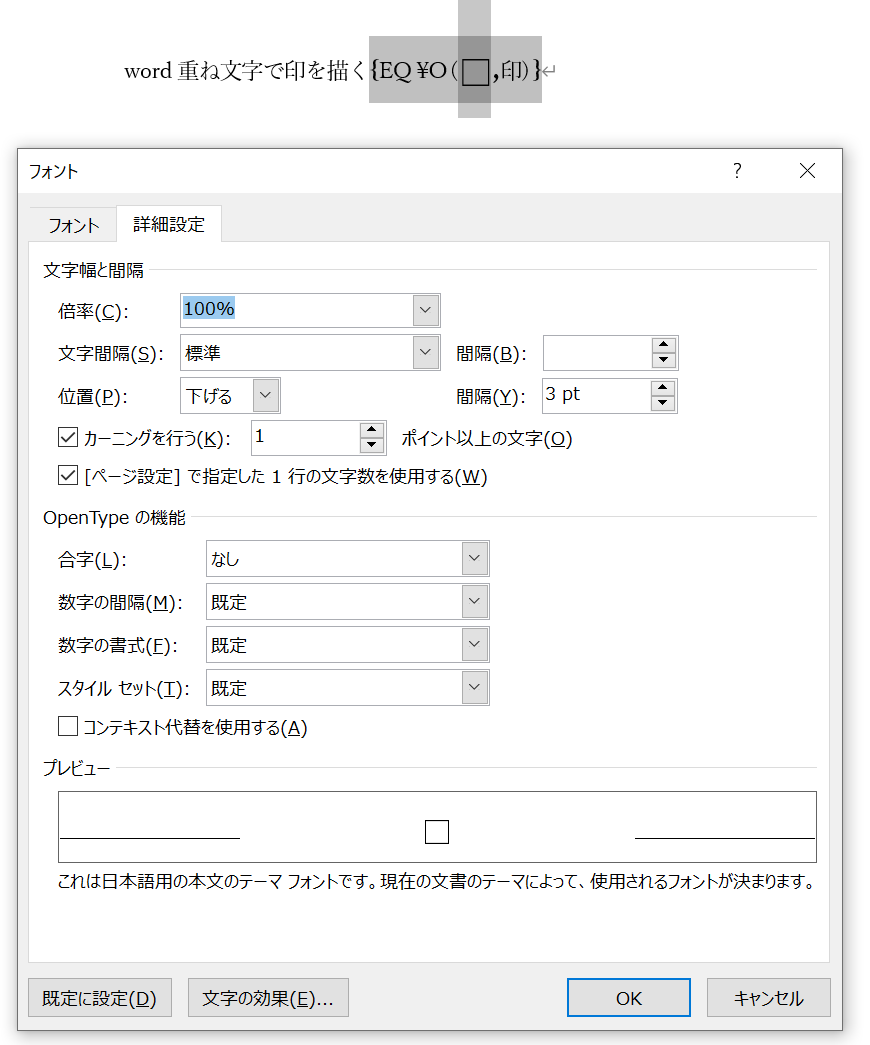

|
USB機能付きPICでパソコンとの通信はabc837などで、またEUSARTとUSB変換モジュールを使ってパソコンへのデータ通信についてはabc764やabc856で紹介したが、C99バージョンでのシリアル送受信について、もう一度確認しておく。
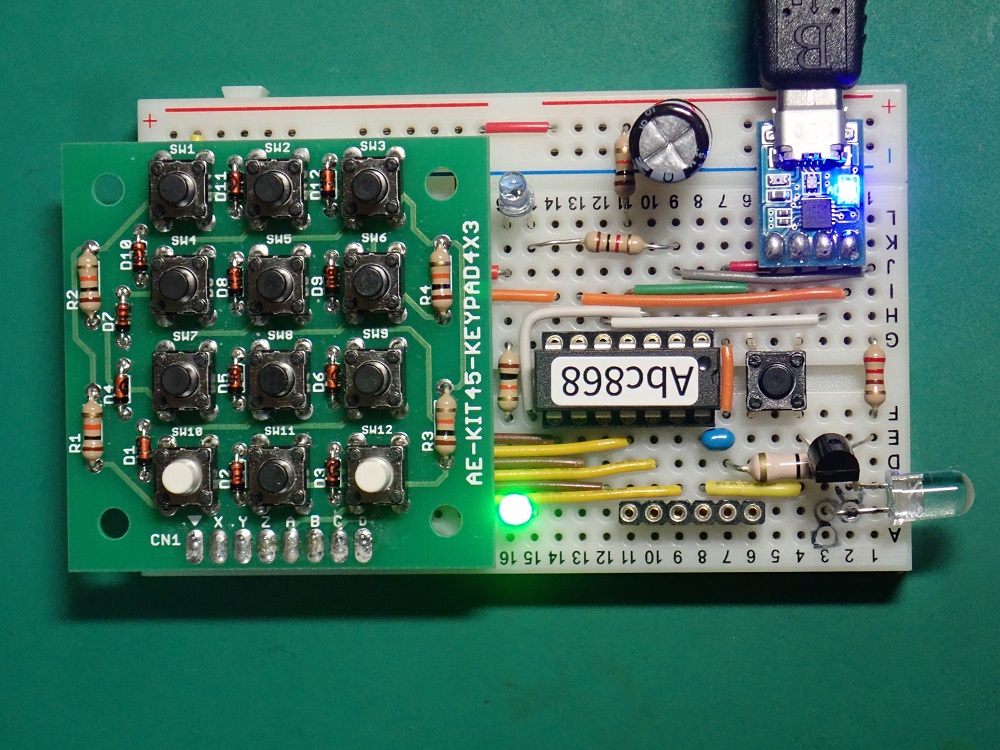
なおPICはPIC16F18424、USB変換モジュールはFT234X(秋月電子)を用いた。回路およびソフトはabc859をベースに、モード付き4x3キー機能をそのまま残し、シリアル通信機能を追加した。
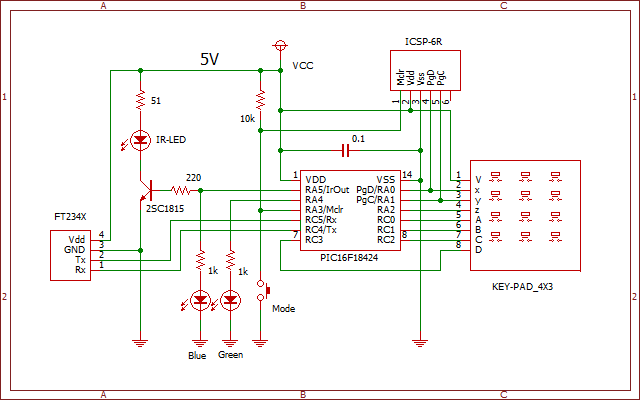
通信機能付き赤外線リモコン回路 (PIC16F18424) |
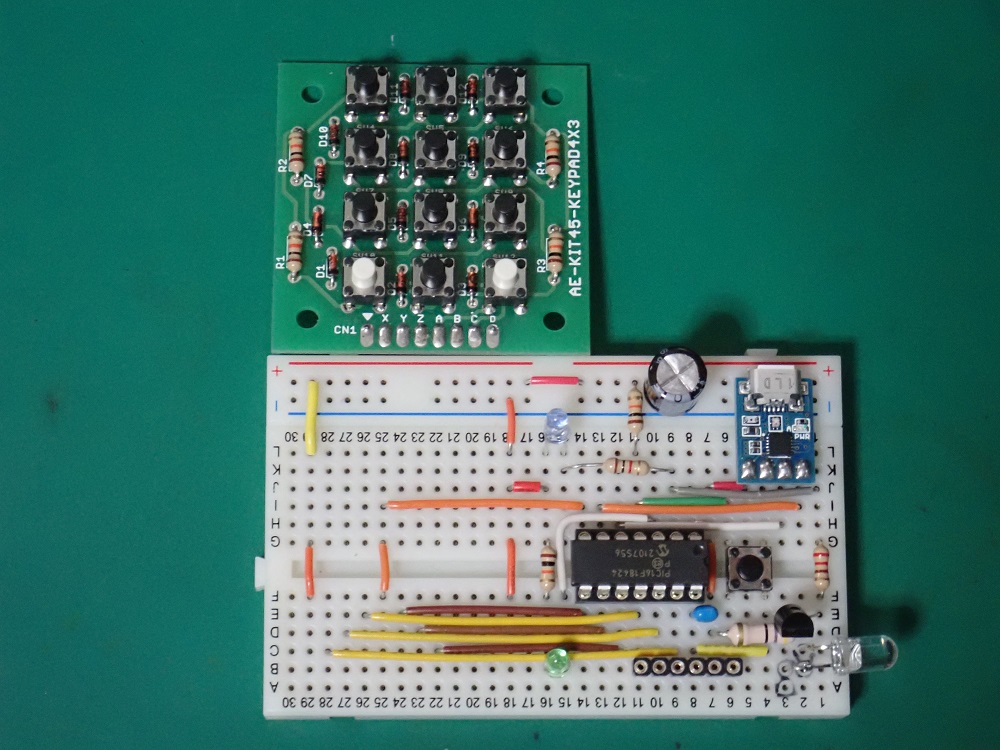
配線したブレッドボード (4x3キーを外した状態) |
PICをUSB接続後、テラタームでシリアル接続を設定し、パソコンの「1」~「9」「a」~「c」キー等を押すと、PICリモコンから1~12チャンネルを出力(テレビのチャンネルも変わった)し、さらにPICは受信文字と出力リモコンコードをパソコンに返信している。また4x3キー入力時にも、出力リモコンコードをパソコンに送信している。
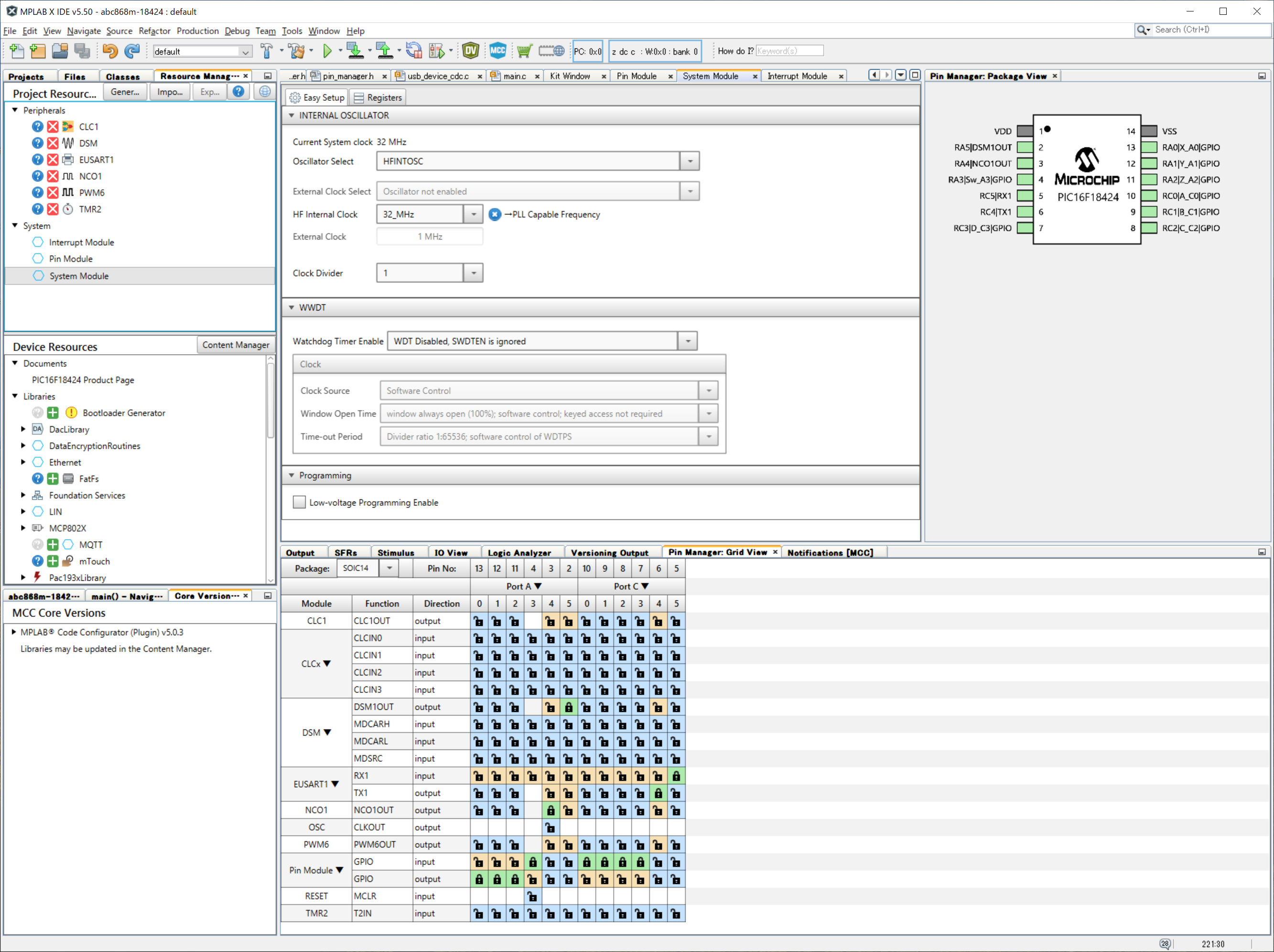
SystemModule |
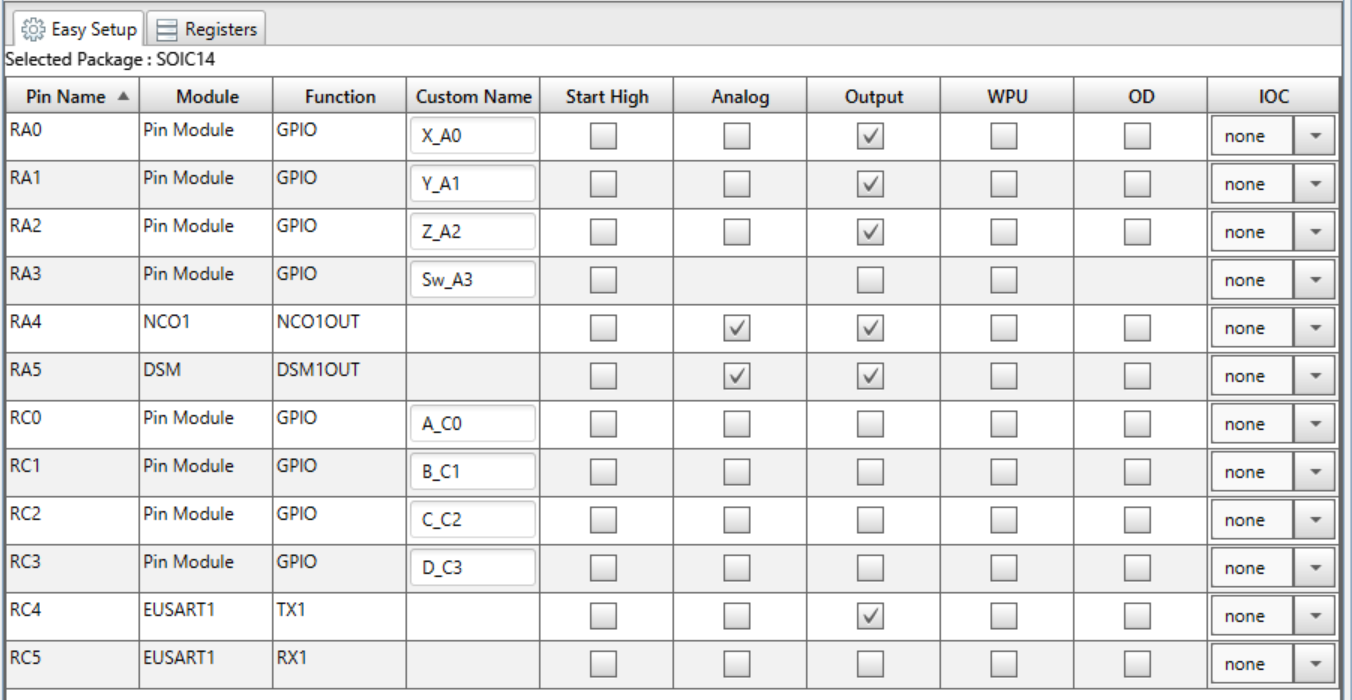
PinModule |
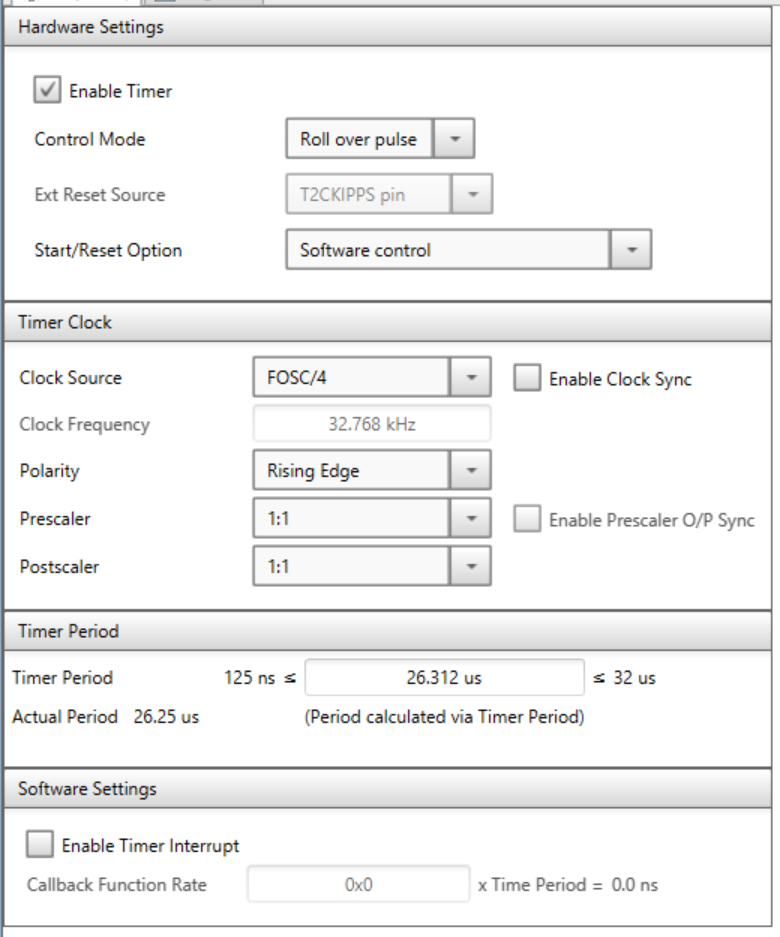
TMR2(Time=26.312us) |
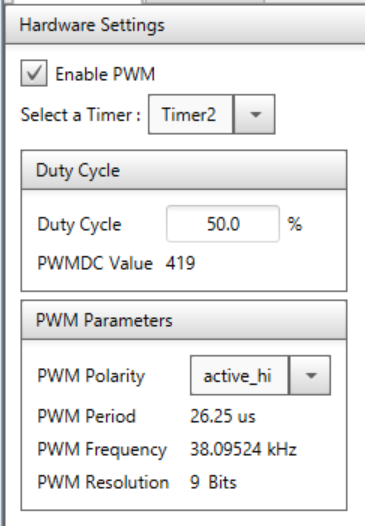
PWM6(38kHz) |
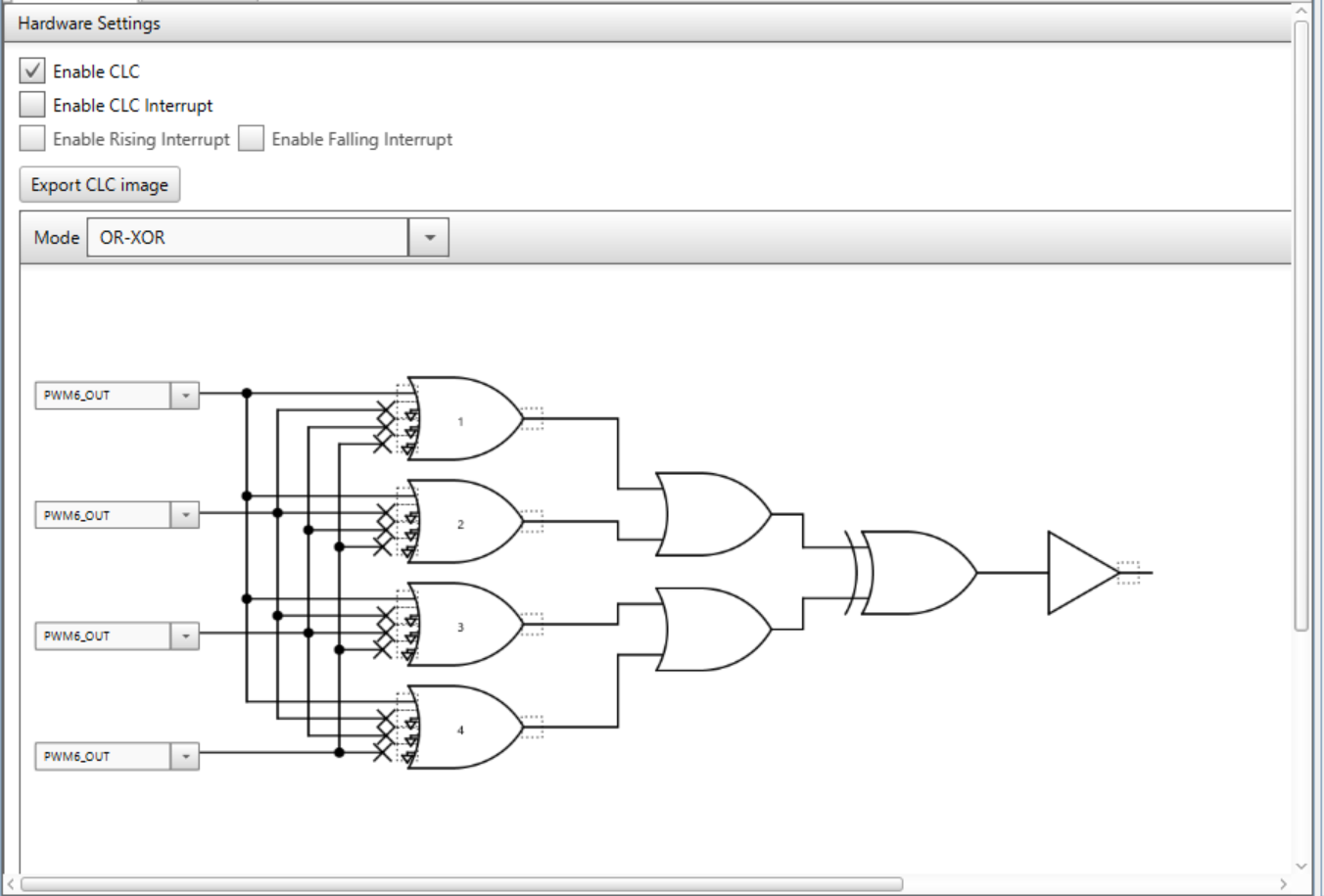
CLC1 (入力は全てpwm6) |
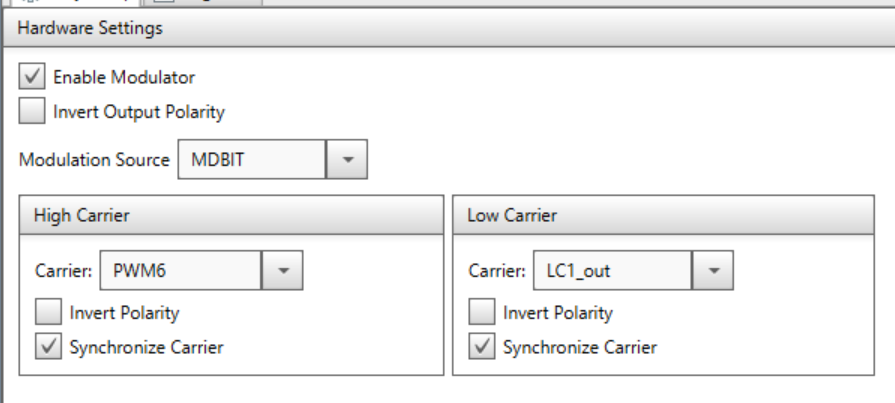
DSM (High=PWM6、Low=LC1_out) |
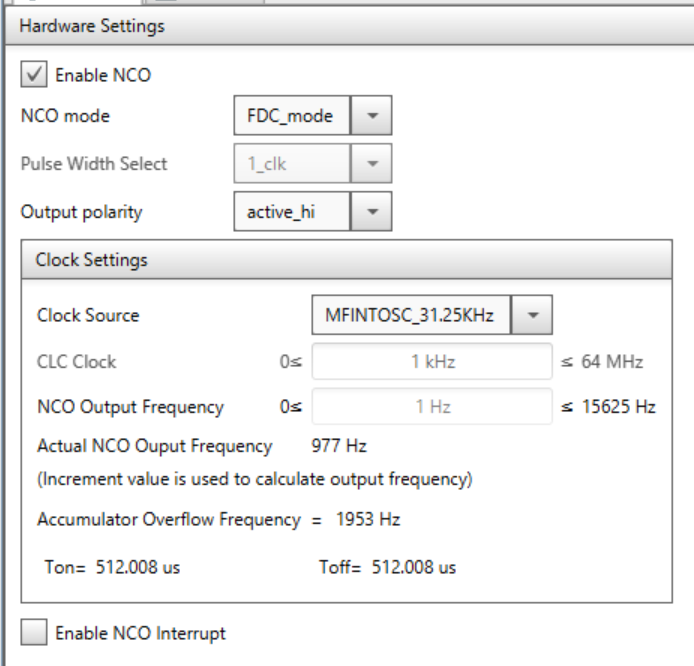
NCO (31.25kHzを使用、1kHz) |
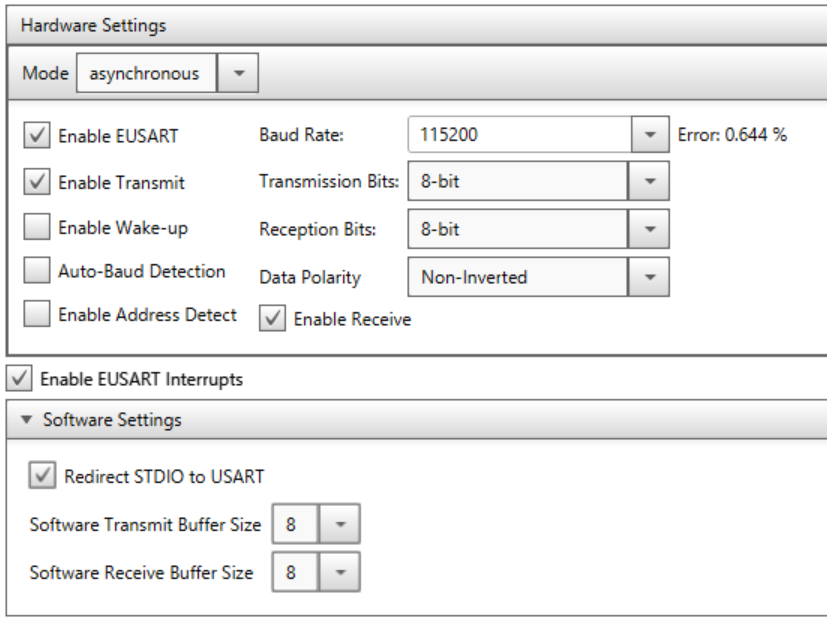
EUSART1 (115200bps、割込許可、useStdio) |
リモコン動作中 (パソコン、4x3キー共に使用可) |
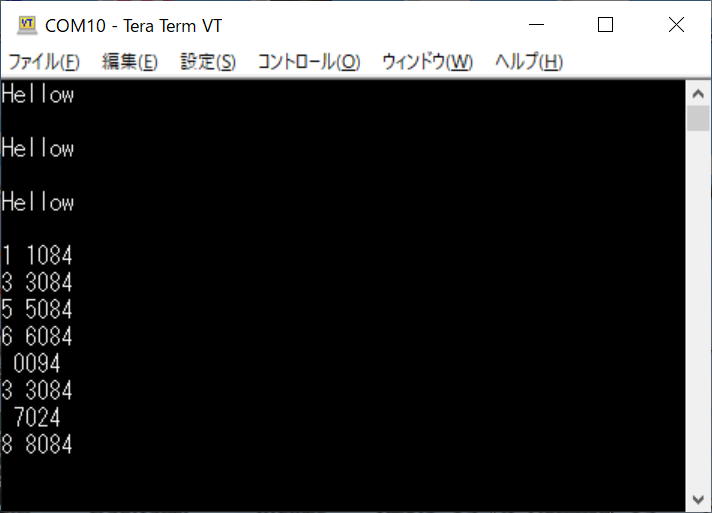
テラターム画面(115200bps) (受信文字無しは4x3キー入力) |
★★ トラブル ★★
パソコンのテラタームで、USB接続したPICがCOMポートとして認識されていなかった。
ハードの問題か?、ソフトの問題か?、といろいろ調べてみるが、どちらも問題なさそうである(PICはシリアル接続動作以外は正常に動作することを確認)。
そこで、以前にシリアル接続が正常に動作していたabc856のリモコン解析器をUSB接続したところ、やはりパソコンで認識されなかった。
そういえば、USBケーブルを新しいものに交換していることを思い出し、以前使っていたUSBケーブルに変更したところ、無事パソコンに認識された(どちらのケーブルもデータ通信対応)。
abc867では新しいケーブルでPIC(USBインターフェース、K-06656)がちゃんと認識されていたが、今回のPIC(USBモジュールFT234X、M-08461)は認識されなかった。
パソコンのUSB接続でPICが認識されない場合はUSBケーブルも疑って見る必要がありそう。
|
最近、新型コロナのニュースが少なくなってきました。それでも相変わらずウィルスは怖いと思うのですが、見出しの本を読んで、ウィルスは我々にとって無くてはならないものであることを認識した。
ウィルスは細胞に侵入し、DNAの改変や組み込みをおこなうこと等により、より早い遺伝的進化が進み、我々人類まで成長することが出来たようだ。また、ウィルスではないが、ミトコンドリアは他の生物(ウィルス?、細菌?)を細胞内にそのまま取り込んだものらしい。
一部のウイルスは自分のDNAの複製を作る折りに、膜で覆われたウィルス工場を作るらしく、この工場が細胞核の原型になったという論文もある。
さらに、同じ竹村正春氏の「新しいウィルス入門」も読んでみると、ウィルスは我々に病気をもたらすが、ウィルスを無毒化し、正常なDNAを体内に送り込むベクターとして使えるという。難治な遺伝病などの治療方法として期待されている。
ウィルスは生物ではないと言われているが、細胞に感染した状態のウィルスが本来の姿であるとも云われており、生物の定義の見直しが必要かもしれない。
※「生物はウィルスが進化させた」(竹村正春著、講談社:BlueBacks、税込1,100円)
※「新しいウィルス入門」(竹村正春著、講談社:BlueBacks、税込1,100円)
テラタームはデフォルトでVT100エミュレートモード(アプリケーションキーパッドモード)になっていて、テンキーなどを押すとVT100の制御シーケンスが入力文字列として送信される。このモードをキャンセルするには、「設定/キーボードの設定」で無効化できるはずだが、何故かうまくいかなかった。
そこで、第2の方法として、テラタームをインストールしたフォルダーにあるKEYBOARD.CNFで、テンキーの設定をoffにする(元設定は;で残した)と、エミュレートモードが解除され、テンキーのトップ文字とおりに入力することが出来た。なお、数値テンキーは変更せずともそのままの数値で送信された。
|
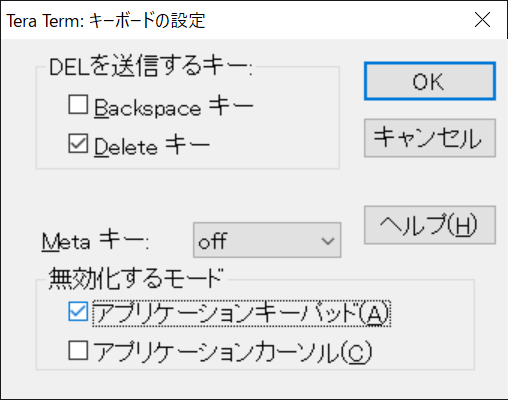
キーボード設定で無効化できるはずだが? |
キーボードモードを変更し、前述の赤外線リモコンのプログラムを下記のように変更したところ、テンキーの記号キーを使ってリモコンコードを指示することが出来た。
|
|
なお、カーソルキーやファンクションキー等も同様にエミュレーションを無効にすることが出来る。
|
※プログラムのリストをハイライト付きのスタイルで見る場合はここをクリック
※ 本レポートの参考・利用は、あくまでも自己責任でお願いします。
 |
 |
 |