C キャンピングカー構造要件の変更 ~8ナンバーの取得
by fjk
キャンピングカーとして8ナンバーを得る条件が令和4年4月1日から変更になった。主な変更点は、
- ①着座姿勢で利用可能な炊事設備(85cm以下)がある場合、床面高さを1.2mとする(従来は1.6m)。
- ②乗車定員3名以下の就寝設備の最低人数を大人1名以上(従来は2名以上)。
この改正により、乗用車をキャンピングカーに改装(8ナンバー化)するのが困難であったのが、より改装しやすくなった。特に軽自動車でのメリットが大きそう。詳しくは、国土交通省のページを参照。
なお、1.4ナンバーは毎年車検だが、8ナンバーは2年ごとの車検。
- ★参考:自動車税(富山県)
-
| ナンバー種類 | 3.5. | 8. | 1.4.自家用貨客兼用車(4人以上)
|
|---|
| (円/年) | 自家用乗用車 | 特殊用途車 | 積載~1t | 積載~2t | 積載~3t |
|---|
| 軽自動車 | 10,800 | 5,000 | 5,000 | ーーー | ーーー |
| 1L以下 | 29,500 | 23,600 | 13,200 | 16,700 | 21,200
|
| 1~1.5L | 34,500 | 27,600 | 14,300 | 17,800 | 22,300 |
| 1.5~2L | 39,500 | 31,600 | 16,000 | 19,500 | 24,000 |
| (乗車定員3名以下のトラック)⇒ | 8,000 | 11,500 | 16,000 |
- ★参考:重量税
-
| ナンバー種類 | 自家用乗用車 | 特殊用途車 | トラック |
|---|
| (円/2年分) | 3.5ナンバー | 8ナンバー | 1,4ナンバー |
|---|
| 軽自動車 | 6,600(車両重量に係わらず) |
| ~0.5t | 8,200 | 8,200 | 6,600 |
| 0.5~1t | 16,400 | 同 上 | 同 上 |
| 1~1.5t | 24,600 | 16,400 | 13,200 |
| 1.5~2t | 32,800 | 同 上 | 同 上 |
N Nゲージ列車のデジタル運転(1) ~PWMパワーパック
by fjk
鉄道模型では列車の走行をパワーパックを使って制御している。昔はアナログ12Vの電圧を制御していたが、最近は電圧を12Vと一定でデジタルパルスの幅を制御するPWM制御がよく使われている。そこで、PICのパルス発生機能を使って列車の走行を制御するパワーパックを作ってみる。
PICのパルス発生方法は、全てプログラムで作成する手法が簡単だが、正確な波形を作るのは難しい。そこで。ハードウェアとしてPICに内蔵しているCIP(周辺モジュール)を使うのが一般的である。PICにはそのためのモジュールとして①CCP、②ECCP、③PWM、④16bit-PWM、⑤CWG、⑥COG、⑦NCOなど(詳細は後述の「おまけ」を参考)がある。
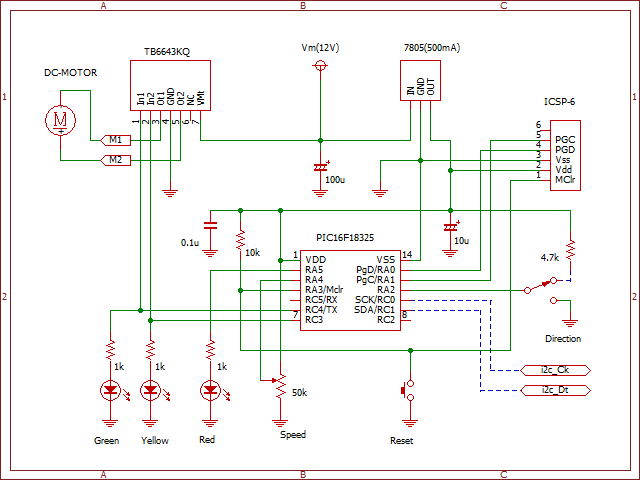
- 1.パワーパック回路図と試作電子回路
- PICは16F18325で2チャンネルのCCP(PWM)、列車のDCモーターには12V1A程度の電源が必要なので、大電流に耐えうるモータードライバー(TB6643Q)を用いた(12V2A_ACアダプタ利用)。
-
 |
 |
| パワーパック回路 |
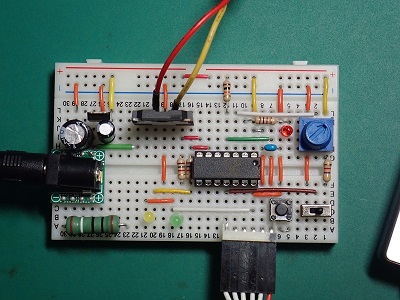
ブレッドボードで試作 |
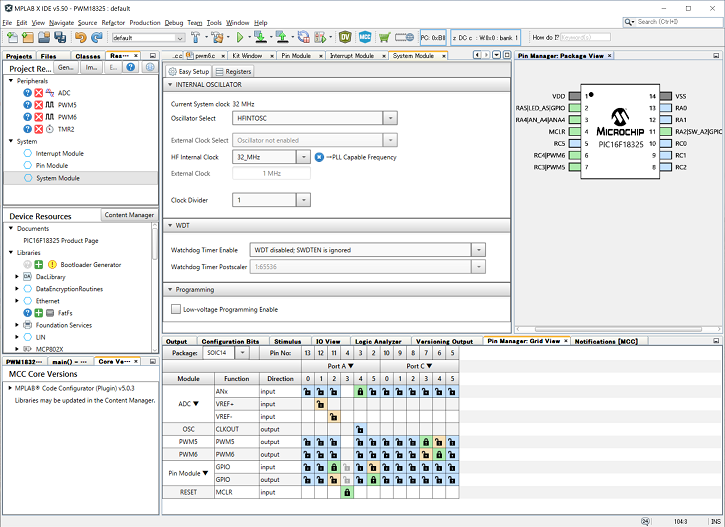
- 2.MCCによる環境設定
- MCCで以下のモジュールを準備しGenarate
●システムクロック:HFINTOSC、32MHz
 |
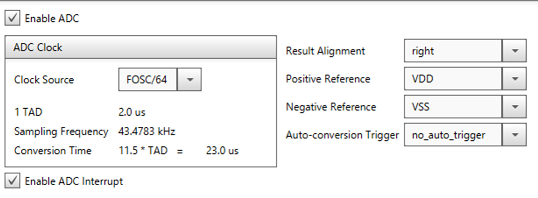
- ●ADC:(CoversionTime = 23uS、割込有り)
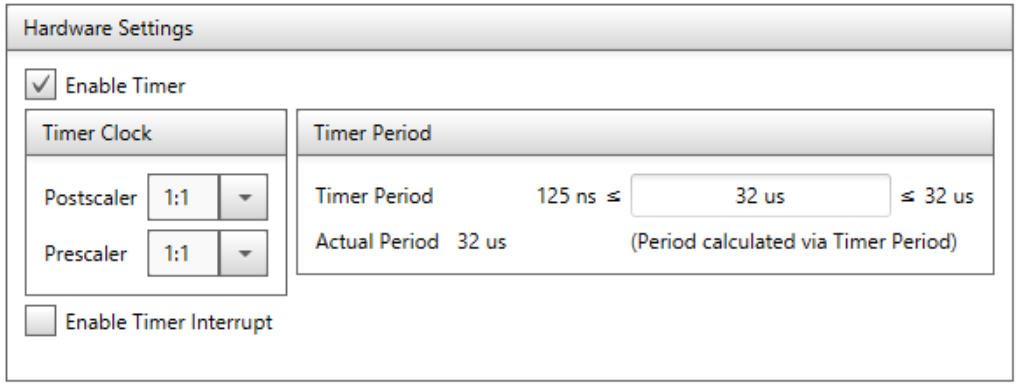
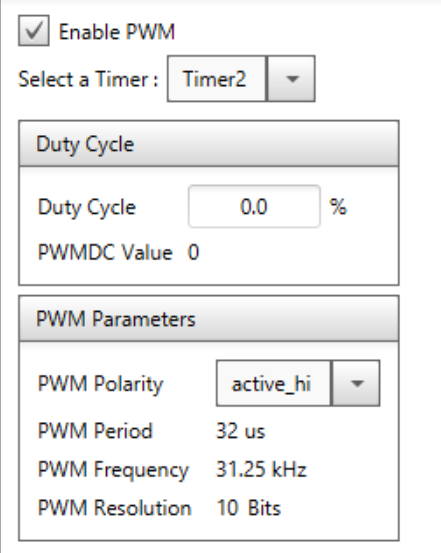
- ●TMR2:(Time Period = 32uS)
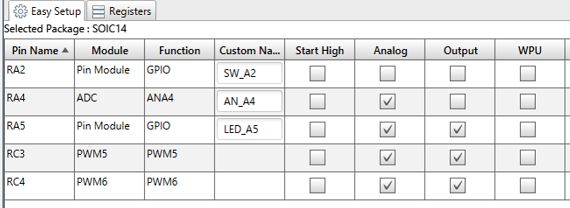
- ●PinModule:(SW_A2、AN_A4、LED_A5、WPU無し)
- ●PWM5、PWM6:(SelectTimer = Timer2)
- 3.制御プログラム
- LEDの明るさ制御と異なり、列車の運転中に電流が流れている状態で方向転換すると、トラブルの元になるので、方向転換スイッチが変わったら、速度ボリュームが0Vになるまでパルス出力を停止し、赤色LEDを点灯している。その後、速度ボリュームが0Vで赤色LEDは消灯し、再びパルス出力が可能となる。すなわち、パルス発生(運転)中に進行方向のスイッチを切り替える(またはリセットスイッチを押す)と緊急停止となる。
変数"aVal"はデバッグ用にグローバル変数としたが、main関数内に記述しても良い。
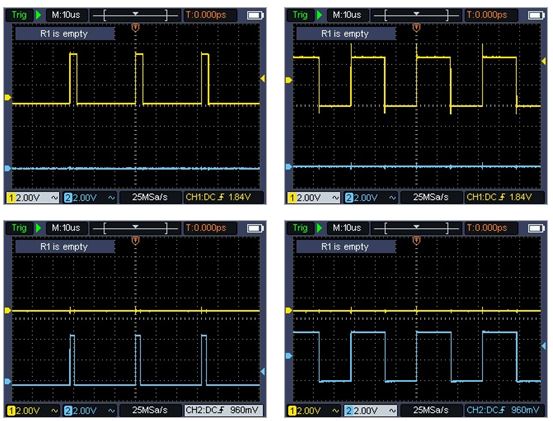
速度ボリュームを回して0Vから電圧を上げてゆくと、PWMのパルス幅が広がり、12VのPWMパルスが出力され、列車が走行した。緑または黄LEDも点灯するので、出力を確認できる。
が・・・、==>続く。(5/27追加)
- main.c
#include "mcc_generated_files/mcc.h"
uint16_t aVal;
void stop_wait_Vr_Zero(void){
LED_A5_SetHigh();
PWM5_LoadDutyValue(0);
PWM6_LoadDutyValue(0);
do{
}while(ADC_GetConversion(AN_A4) > 0);
LED_A5_SetLow();
}
void main(void)
{
SYSTEM_Initialize();
INTERRUPT_GlobalInterruptEnable();
INTERRUPT_PeripheralInterruptEnable();
uint8_t drc;
uint8_t d_sw;
drc = SW_A2_PORT;
stop_wait_Vr_Zero();
while (1)
{
d_sw = SW_A2_PORT;
if(d_sw != drc){
stop_wait_Vr_Zero();
drc = d_sw;
}
aVal = ADC_GetConversion(AN_A4);
if(drc == 0){
PWM5_LoadDutyValue(aVal);
PWM6_LoadDutyValue(0);
}else{
PWM5_LoadDutyValue(0);
PWM6_LoadDutyValue(aVal);
}
}
}
|
-
 |
 |
PWM波形例(10~50%)
(上:PWM5、下:PWM6) |
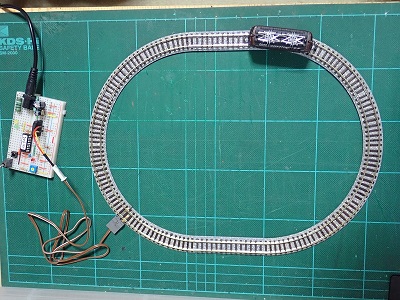
R103で列車の走行テスト
(車両はBトレインshorty) |
※本レポートの参考・利用は、あくまでも自己責任でお願いします。
~~~~<おまけ(PICのCIP)>~~~~~~~~~~~~~~
PICマイコンでコアから独立した周辺モジュール(CIP)はハードウェアで構成される周辺モジュールで、クロック速度、消費電力、ソフトウェアの複雑さを低く抑え、応答時間を短縮しながら、8ビットアプリケーションの性能を向上できる(PICがスリープ中でも信号の出力・処理が可能)。
パルス発生に関係する主なモジュールは、
- ① CCP(Caputer/Compare/PWM)
- 16ビットのカウンタで構成され、パルスのカウント、カウンタの比較、パルス幅変調(PWM)の3機能がある。ただし、PWMは最大8+2の10ビットで動作。
- ② ECCP(Enhanced CCP)
- CCP機能のPWMモードを強化したもので、単純なパルス矩形波のみならず相補出力信号出力(デッドタイム設定、シャットダウン機能付き)を追加したもの。
- ③ PWM(Pulse Width Modulation)
- CCP機能からPWM機能だけを分離したもの
- ④ 16bit-PWM
- PWM波形の位相や同期の設定、センターアラインなどの機能が追加されている。
- ⑤ CWG (相補波形ジェネレータ、Complementary Waveform Generator)
- ECCP機能から(1つの入力信号からの)相補出力信号部分を分離したもので、ハーフブリッジ、フルブリッジ、およびステアリングのPWM波形を生成する。ECCP機能との下位互換性がある。
- ⑥ COG (相補出力ジェネレータ、Complementary Output Generator)
- CWGより高度な相補波形モジュレータで、イベントドリブン方式で信号を生成。
- ⑦ NCO (数値制御オシレータ、Numerically Controlled Oscillator)
- 20ビット幅のアキュームレータと加算機からなり、固定デューティモード(FDG)および周波数パルスモード(PF)の2種類のパルス波形を生成。
- ⑧ COMP (アナログコンパレータ、Comparator:) (シャットダウン用電圧の比較など)
- 内部や外部からの入力される2つのアナログ電圧を比較しH又はLを出力。
- ⑨ FVR (定電圧リファレンス、Voltage Reference:)
- 1.024Vの定電圧電源があり、この1,2、4倍の電圧をPIC(DACやCOMPなど)に供給できる。
- ⑩ DAC(Digital-to-Analog Converter)
- 5/8/10ビットのデジタルアナログ変換器。(FVRと一緒に用いて任意の基準電圧を作成)
- ⑪ ADC(Analog-to-Digital Converter)
- 10/12ビットのアナログデジタル変換器 (アナログVR入力でパルス幅の制御)
- ⑫ CLC(Configurable Logic Cell)
- プログラム可能なロジック回路をPICに内蔵したもの。
- ⑬ PPS(Peripheral Pin Select)
- PIC内部の機能を柔軟にピンに割り当てる機能。
---- クロック発生用 (参考)---
- ・TMR0(Timer)
- 基本的な16ビットタイマー。カウントアップのみ。
- ・TMR1,3,・・
- ゲート付きの16ビットカウンタ
- ・TMR2,4,・・ (パルス発生用ベースクロックに用いる)
- プリセット・リセット機能付き8ビットカウンタ